- Overview
- Company Profile
Basic Info.
Model NO.
eRob90H80I
Type
Z2
Certification
CE
Brand
Tinsmith
Product Name
High Efficiency Integrated Robot Joint Motor Robot
Harmonic Reducer-Ratio
20-80
Start-Stop Peak Torque
96nm
Rated Torque
44nm
Momentary Allowable Maximum Torqu
165nm
Peak Speed of Output
37.5rpm
Motor Power
300W
Rated Current
6.7A
Peak Current
20.1A
Weight
1.98kg
Power Supply Voltage
48V
Through Hole Diamete
18mm
IP Class
IP54
Motor Brake Type
Friction Damping Brake
Communication Mode
Ethercat/Canopen/Modbus
Transport Package
Express DHL, FedEx
Specification
iron, steel
Trademark
TINSMITH
Origin
China
HS Code
8479909090
Production Capacity
10000/Year
Product Description
Product Introduction
This eRob series robot joint module is a standardized joint module product based on our own servo drives and absolute encoders based on years of experience in serving customers, making robot development easier, faster, safer.
This eRob series robot joint modules include eRob70, eRob80, eRob90, eRob110, eRob142, eRob170 etc., with exquisite design and compact structure. The compact size includes servo drivers, motor side absolute value encoder, output side absolute value encoder, and frameless torque motors, brakes, precision harmonic reducers and other main components, which save customers hundreds of mechanical and electronic components selection, design, procurement, assembly labor and time costs.

Product Features
TINSMITH Robot Joint Modules help clients Save the manpower and time cost of selecting, designing, purchasing and assembling hundreds of mechanical and electronic devices.

eRob90I robot joint servo motor has an outer diameter of only 90mm, a height of 98.9mm and a through-hole of 18mm. 1980g super light weight, torque deadweight ratio up to 50N-m/kg.

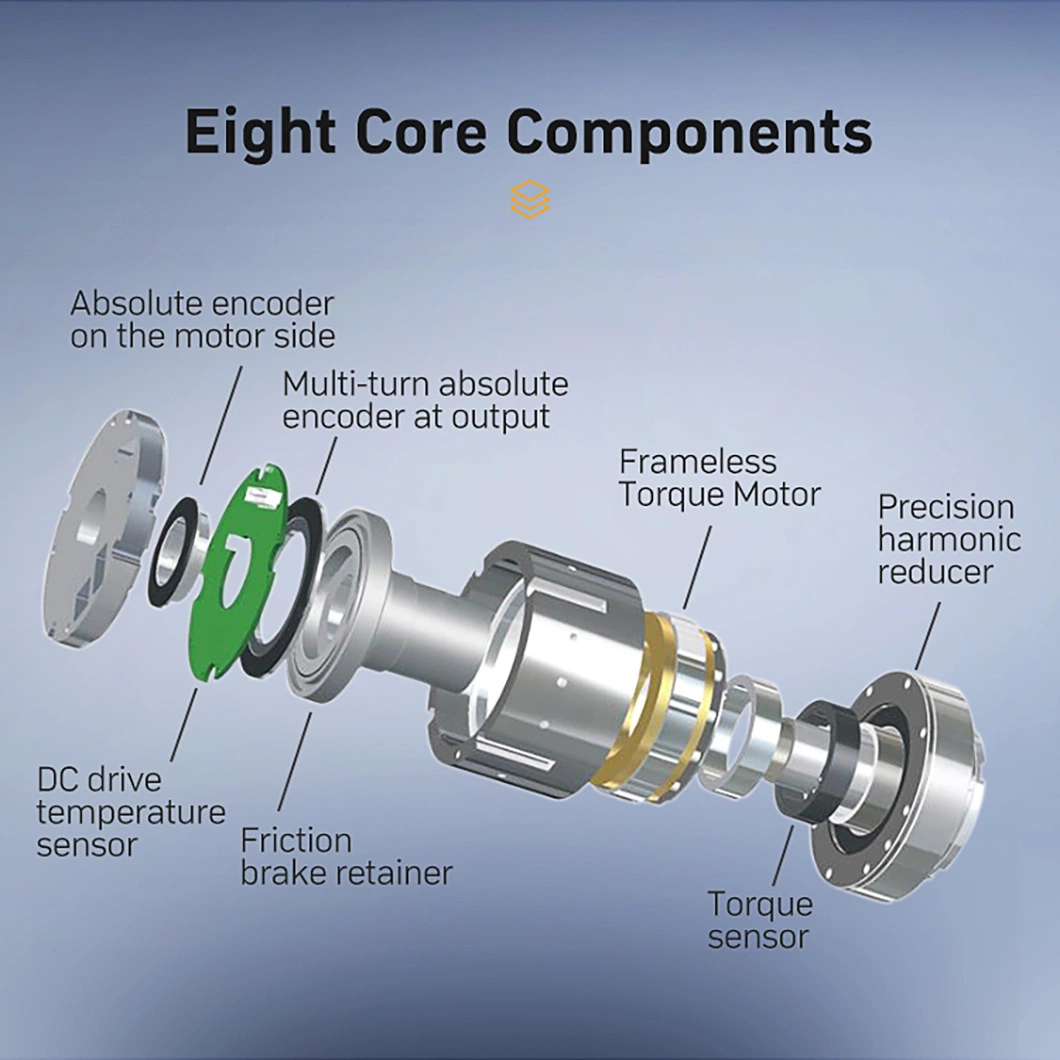
This series robot joint module includes Eight core components as below, motor end absolute value encoder, multi-turn absolute encoder at output, Frameless Torque Motor, precise harmonic reducer,Torque sensor, friction brake retainer and DC drive temperature sensor.
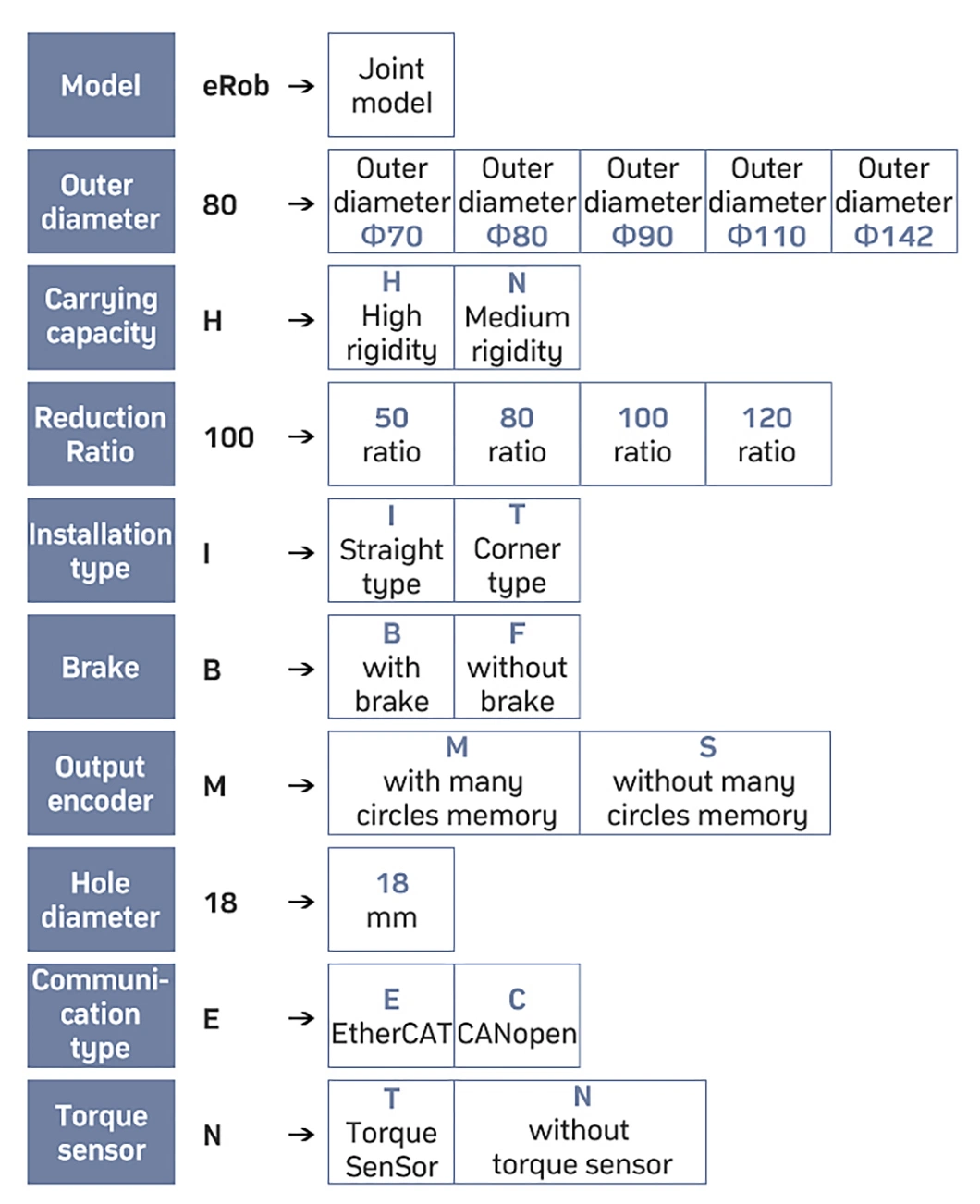
Various specifications and sizes for TINSMITH eRob series robot joint modules

Built-in servo driver. Communication protocols
With EtherCAT, CANopen, Modbus communication protocols.
Position,Speed, Current loop PID adjustable online.
Built-in ± 10V analog input.
Pulse and direction, I/O, RS485,
External encoder and STO interface,
All in the space of DxL=70x75.3mm (for eRob70H) 90*98.9mm for eRob90I robot joint motor.

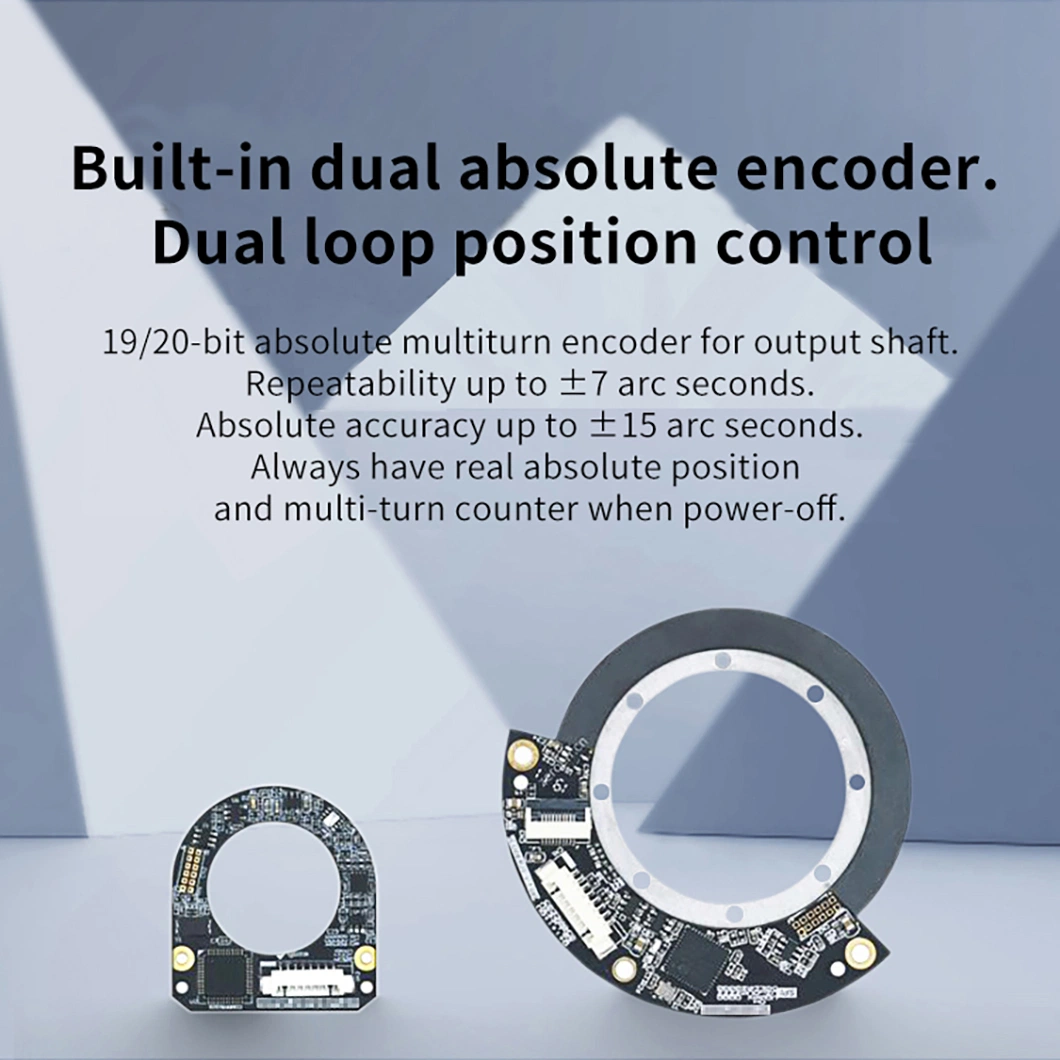
Built-in dual absolute encoder. Dual loop position control
19/20-bit absolute multiturn encoder for output shaft.
Repeatability up to ±7 arc seconds.
Absolute accuracy up to ±15 arc seconds.
Always have real absolute position and multi-turn counter when power-off.
Friction brake inside
Brake smooth and stable.
No gap; No backlash.
No need to move when power-on.
No wear and tear.
Can be used as Emergency Stop.

Product number
Product Parameter of eRob90 robot joint module
Packaging list
1. eRob joint module motor*1
2.48V power connector (2Pin)*2
3.CANopen connector and wiring (3 Pin)*2
4.EtherCAT connector and wiring (4Pin)*2
5.I/O connector and wiring (12Pin)-Optional

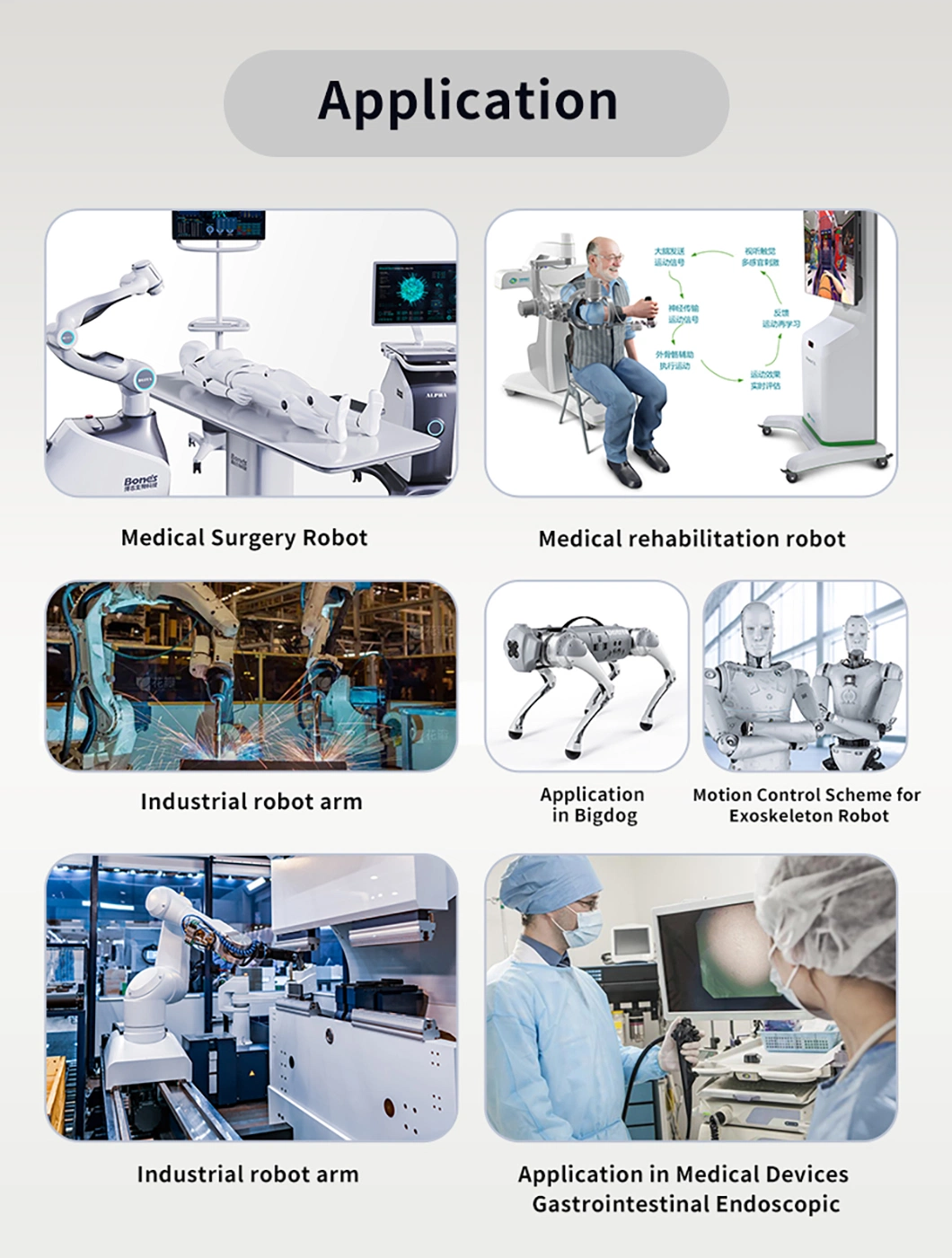
Application of eRob series robot joint module
This kind of robot joint m Contodules could be used for Motionrol Scheme for Exoskeleton Robot, Medical Devices Gastrointestinal Endoscopic, Medical rehabilitation robot, Bigdog, Industrial robot arm, welding robot etc.
This eRob series robot joint module is a standardized joint module product based on our own servo drives and absolute encoders based on years of experience in serving customers, making robot development easier, faster, safer.
This eRob series robot joint modules include eRob70, eRob80, eRob90, eRob110, eRob142, eRob170 etc., with exquisite design and compact structure. The compact size includes servo drivers, motor side absolute value encoder, output side absolute value encoder, and frameless torque motors, brakes, precision harmonic reducers and other main components, which save customers hundreds of mechanical and electronic components selection, design, procurement, assembly labor and time costs.

Product Features
TINSMITH Robot Joint Modules help clients Save the manpower and time cost of selecting, designing, purchasing and assembling hundreds of mechanical and electronic devices.

eRob90I robot joint servo motor has an outer diameter of only 90mm, a height of 98.9mm and a through-hole of 18mm. 1980g super light weight, torque deadweight ratio up to 50N-m/kg.

This series robot joint module includes Eight core components as below, motor end absolute value encoder, multi-turn absolute encoder at output, Frameless Torque Motor, precise harmonic reducer,Torque sensor, friction brake retainer and DC drive temperature sensor.

Various specifications and sizes for TINSMITH eRob series robot joint modules

Built-in servo driver. Communication protocols
With EtherCAT, CANopen, Modbus communication protocols.
Position,Speed, Current loop PID adjustable online.
Built-in ± 10V analog input.
Pulse and direction, I/O, RS485,
External encoder and STO interface,
All in the space of DxL=70x75.3mm (for eRob70H) 90*98.9mm for eRob90I robot joint motor.

Built-in dual absolute encoder. Dual loop position control
19/20-bit absolute multiturn encoder for output shaft.
Repeatability up to ±7 arc seconds.
Absolute accuracy up to ±15 arc seconds.
Always have real absolute position and multi-turn counter when power-off.

Friction brake inside
Brake smooth and stable.
No gap; No backlash.
No need to move when power-on.
No wear and tear.
Can be used as Emergency Stop.

Product number

Product Parameter of eRob90 robot joint module
| Model | eRob90H | |||
| Harmonic reducer-ratio | SHG 20-50 | SHG 20-80 | SHG 20-100 | |
| Start-stop peak torque(N.m) | 73 | 96 | 107 | |
| Rated torque(N.m) | 33 | 44 | 52 | |
| Momentary allowable maximum torque(N.m) | 127 | 165 | 191 | |
| Peak speed of output(RPM) | 60 | 37.5 | 30 | |
| Motor power(W) | 300 | |||
| Rated current(A) | 6.7 | |||
| Peak current(A) | 20.1 | |||
| Without brake model | Inertia of rotor(g.mm²) | 139057 | ||
| Outer diameter x length (mm) | 90x98.9 | |||
| Weight(kg) | 1.98 | |||
| With brake model | Inertia of rotor(g.mm²) | 147025 | ||
| Outer diameter x length (mm) | 90x98.9 | |||
| Weight(kg) | 2.1 | |||
| Common parameter | Power supply voltage: 48V (±10%), through hole diameter: 18mm, IP class: IP54, brake type: friction damping brake | |||
| Optional assembly configuration | Communication mode: EtherCAT/CANopen/Modbus, output encoder resolution: 19/20Bit, repeat/absolute positioning accuracy: ±7/±15 arcseconds or ±10/±25 arcseconds | |||
Packaging list
1. eRob joint module motor*1
2.48V power connector (2Pin)*2
3.CANopen connector and wiring (3 Pin)*2
4.EtherCAT connector and wiring (4Pin)*2
5.I/O connector and wiring (12Pin)-Optional

Application of eRob series robot joint module
This kind of robot joint m Contodules could be used for Motionrol Scheme for Exoskeleton Robot, Medical Devices Gastrointestinal Endoscopic, Medical rehabilitation robot, Bigdog, Industrial robot arm, welding robot etc.

Zhengzhou Defy Mechanical&Electrical Equipment Co., Ltd is a professional manufacturer of Robotic Joint Module. Our factory dedicates to the research of robot joint motor since 2010s, more than 10 years' experience makes our product quality rank in the leading position in China. Wth an annual output of 500,000 sets of various products for the market, with high precision and stable performance, our robotic joint modules are welcomed by customers from India, Thailand, Iran, South Korea, Russian Federation, Sweden, Ireland, Poland, USA, France and so on.